コントロールシステム
1.宇宙型プラネタリウムの制御システム
 |
旧式のプラネタリウムでは、天体の複雑な動きをすべて機械的に再現していました。そこでは、制御システムといっても、投影機のランプやモーターの電力を手動で変えるための、配電盤程度のもので済みました。ところが、宇宙型プラネタリウムではほとんどの機能がコンピュータで制御されます。そのため、システムの担う仕事量は、従来式プラネタリウムのそれとは比較にならないほど膨大かつ複雑なものとなります。
アストロライナーをはじめ、宇宙型プラネタリウムには、星空(恒星)を投影する本体投影機と、太陽や惑星を投影する太陽系投影機が備わっています。これらを常に正しい状態に保つために、まずコンピューターが天体の位置を計算します。そして、その計算結果をもとに、それぞれの投影機をむけるべき方向(指令値)をはじき出します。一方、現在の投影機が向いている角度(実値)を監視します。実値と指令値の間に誤差があれば、その誤差を少なくするようにモーターを動かします。このことを繰り返すことで、すべての天体がつねに正しい方向に投影されるわけです。
アストロライナーのコントロールシステムは、大まかに2つの世代を経てきました。初公開時に使用したシステム1、そしてフルオートを実現したシステム2です。
 |
 |
 |
|
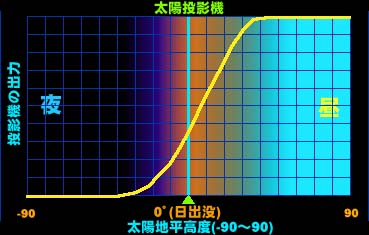
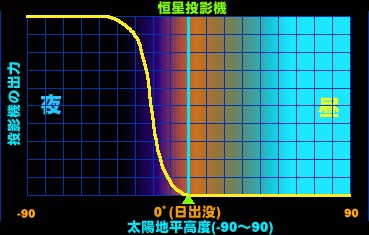
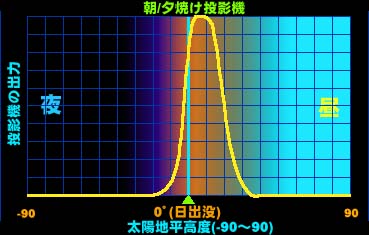
太陽高度と、各投影機の出力の関係を、上のような関数(調光関数)で設定しておくと、太陽の高さに応じて照明や投影機の光源などがコントロールされる。昼間は太陽を点灯させ、太陽が低くなるにつれて照明や太陽を暗くしてゆき、太陽が地平線付近にきたときは朝焼け夕焼けを点灯させ、夜は星を投影する。これが連動調光で、投影中の操作労力を大幅に減らすことができた。 |
システム1では、コンピュータ支援による半自動操作(セミオート)が可能となっていました。これは、人間の操作に操作追従して、さまざまな機能が自動制御されるというスタイルです。
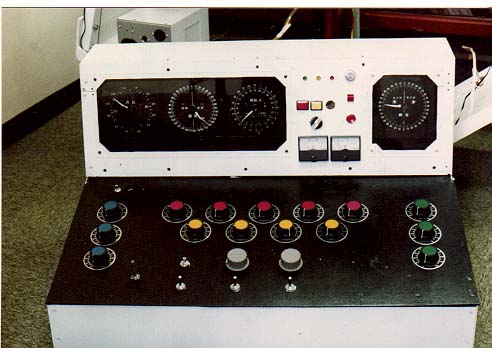
システム1のコンソールに座ったオペレーターがすることは、主に時刻や緯度、経度変化などダイヤルを操作することです。オペレーターの操作により、本体投影機が回転します。それに追従して、太陽の動きが自動制御されます。また、照明や各種投影機の出力がコントロールされます。基本操作は人間が行い、それに追従する形でほかの部分の操作をコンピュータが行うわけです。
従来式プラネタリウム、あるいは大平のこれまでの自作プラネタリウム(1,2号機)に比べ、アストロライナーのシステム1で最も画期的だったことは、照明の自動化でした。それは、太陽地平高度に連動して自動操作する連動調光機能です。プラネタリウムには、恒星や太陽、各種の照明など、明るさをコントロールしなければならない機能がたくさん備わっています。手動式のプラネタリウムではそれらをすべてオペレーターが操作していました。たとえば日没の演出のばあい、オペレーターはこんな操作をしなければなりません「太陽を沈ませながら、太陽と照明を暗くて、それにああわせて夕焼けを灯し、太陽を消して照明をさらに暗くしながら星を少しずつ明るく・・・」。腕が何本あっても足りません。こうした複雑で熟練を要する操作からオペレーター(&解説者)を解放し、しかもミスなくきれいな演出を実現することができたのです。
システム1は、その操作の大半が自動化されてはいるものの、大本となる本体投影機操作は手動になっていました。これに手を加えて本体投影機の制御をコンピュータに行わせることも可能でしたが、システム全体の整合性、拡張性に問題があり、システム1を改造して機能強化を図ることは得策ではないと考えました。
それに代わり、一新して開発したシステム2では、すべての機能の操作権をコンピュータに移していることが特徴です。システム1では、本体は人間が直接操作し、他の投影機がコンピュータ制御で追従するという形態でしたが、システム2では本体投影機も惑星投影機も、すべての投影機を同列にコンピュータの管理下にあります。システム1にあった、計器表示機能まで兼ね備えた大きなマニュアルコンソールは姿を消し、その代わりに中央制御装置CCSが入ります。CCSはすべての機能を管理するシステムの中枢神経であり、各投影機をコンピュータと直接結合しつつ、必要に応じて人間が介入できるようにしています。CCSは制御装置であり、表示機能はすべてコンピュータのディスプレイが担います。操作は、卓上のコンパクトなマニュアルコンソールとパソコンのマウス操作で行います。それは、常設プラネタリウムのコンソールをイメージしたがゆえに機動性に問題が出たシステム1の反省の結果であり、移動式プラネタリウムに特化したシンプルで高機能なシステムという設計思想から生まれたものでした。
3.システム2のハードウエア
システム2は、その中央にCCSを据え、これにメインコンピュータや投影機側の駆動装置を接続した形となっています。
 |
|
|
 |
|
|
 |
|
|
運動系は、本体投影機および、太陽系投影機の中の天体投影機などの駆動軸を制御する部分です。たとえば、本体投影機には3軸の回転軸があります。また、太陽や惑星などの天体投影機には、それぞれXYの2軸もしくはそれ以上の軸があります。CCSは、それらの合計22軸の制御機能を持ち、本体ならびに各種天体投影機の軸をリアルタイムに駆動・制御することができます。
運動系の制御機能はコンピュータで管理されています。コンピュータの指令により、回転速度に応じた周波数のパルスを出力され、モーターが回転します。モーターの回転位置は、16ビットのカウンタでカウントされ、現在位置情報となります。このデータがCCS内部のレジスタに一時ストアされた後、コンピュータに読み込まれます。コンピュータはこのデータから、投影機が現在向いている方向を割り出し、指令値との誤差比較を行ってモーター側に速度指令を行う、といった一連の動作が繰り返され、つねに指令値に追従してモーターが回転することになります。
2)調光系
調光系は、恒星や照明、太陽などのさまざまな光源、計15チャンネルの明るさをコントロールする部分です。コンピュータによる自動操作の場合、コンピュータの指令により周波数指令信号が発生し、これがCCS内部でACライン同期のPWM信号に変調され、これが各種投影機に送られます。
3)オート/マニュアル機能
アストロライナーには、3つの動作モードがあります。 ひとつはハードウエアマニュアルモードで、コンピュータの指令なしに、手動操作で直接投影機を制御します。これは、コンピュータが作動していない状態でも使用できるので、設置撤収時に使います。本番投影では、非常時を除いて原則として使用しません。
ふたつめは、ソフトウエアマニュアルモードです。これはコンピュータの管理下で、擬似的にマニュアル操作をおこなうものです。つまりコンピュータが起動していないとこのモードは使用できません。解説席のダイヤルを操作すると、その情報がコンピュータに伝達され、その値をもとにコンピュータが投影機を制御します。ダイヤルの機能をソフトウエア上で自由にアレンジでき、また複雑な機能を簡単な操作で実現することができます。本番投影中の手動操作はたいていこのモードで行います。
3つめはオートモードです。投影機のすべての機能が自動操作されます。操作のシーケンスは、専用の言語で記述したシーケンスチャートにもとづいて行われます。ただし、途中でキュー(一時停止)コマンドが入ると、一時的にソフトウエアマニュアルモードに切り替わります。
4)電力系
アストロライナーの電力系は、動力信号系と照明系の2系統に分離されています。それは、移動公演時の停電対策のためです。動力信号系の主幹は直流24Vで、各投影機のモーター動力用となるほか、5V/12V信号電源の源にもなります。24Vラインには、バッテリが接続され、主電源が停止しても、一定時間バックアップされるようになっています。一方、光源系はAC100Vとなっており、バックアップはされません。アストロライナーの分離2系統電源は、移動式ゆえんのものといえます。
1)CCS(中央制御装置)
CCSは解説席のすぐ下に置かれます。内部には、運動系制御用のメインバスとそのためのコントローラ、調光制御回路、オートマニュアルコントローラ、電源制御回路などが組み込まれています。メインバスは16ビットで、ここに各モーター実値監視用のカウンタボードがずらりと並べられています。また、マニュアルコンソールインターフェースもこのメインバスに接続されます。
2)MDU(本体投影機駆動装置)
本体投影機の駆動装置です。CCSとは、1MBpsの多重伝送線で接続され、CCSから多重化して送られたモーターの駆動信号や調光信号を受信してデコード(復号)し、本体投影機ならびに太陽系投影機に送ります。内部には、照明用のコントローラも組み込まれています)
3)SDU(太陽系投影機駆動装置)
太陽系投影機を構成する各種天体投影機を制御します。内部には、太陽系投影機制御バスがあり、これに天体ごとのコントロールインターフェースが接続されます。このインターフェースを介して、天体投影機が制御されます。
4)マニュアルコンソール
CCSに接続される小型の卓上操作盤です。15の調光ダイヤルと3つの運動系操作ダイヤル、およびファンクションスイッチをもちます。ソフトウエアマニュアルモードでは、ファンクションスイッチと3つの運動系ダイヤルのみを使用します。ハードウエアマニュアルモードでは、すべてのダイヤル操作が有効となり、こ投影機がコンピュータを介さずに直接制御されます。
5)デジタルインターフェース
CCSとMDUを接続する多重伝送ラインです。バイフェーズマーク変調(マンチェスタ符号)された同期多重信号により、パルス信号をリアルタイムかつ双方向に通信します。
6)メインコンピュータ
CCSとならぶシステムの中核です。PC98シリーズのパーソナルコンピュータです。システム2においては、全機能の操作権をもち、また各種情報の表示もこの中のディスプレイ画面で行います。
4.ソフトウエア
4.1 天体位置計算宇宙型プラネタリウムを最も決定づけるのが、独立型太陽系投影機です。これを制御するためには、まず、各惑星の位置を正確かつ高速に計算する必要があります。つづいて、それをもとに投影機の目標角を決め、その目標に正しく追従するようにモーターを回転させます。その手順は、次の通りです。
まず、時刻引数(太陽系力学時[TDT])をもとに太陽を原点とした座標を求めます。基本的には、太陽との2体問題としてケプラーの法則に基づき位置計算を行います。ただし、1000年単位の過去未来では、摂動による位置誤差が数度以上に達するため、軌道要素を時間関数として摂動項の補正を行っています。摂動項の算出には、JPL(米ジェット推進研究所)の太陽系力学モデルに基づき過去未来1万年の範囲で天体の力学計算を行い、100日単位で軌道要素を抽出、これを時間関数とするため、最小自乗法による多項式と三角関数の高次式の和で近似式を作成しています。5次の多項式と3次の三角関数式により、過去未来1万年の範囲において、水星から冥王星までのすべての惑星位置をJPLモデルに対して0.1度以内の精度(日心位置)で計算することができます。
この方法でまず平均近点離角をもとめ、ケプラー方程式を解いて真近点離角を求めます。ケプラー方程式の解法は、ニュートン法をベースに、独自の改良を加え、離心率が高い場合の級数収束性を高めた独自のアルゴリズムを採用しています。真近点離角より軌道面XY座標を求め、つづいて黄道面を基準とした直交座標に変換します。このときの座標は、2000年分点にもとづく座標系としています。
こうして得られた天体の座標より、地球座標を除して地心座標を求め、ついで経度、緯度、グリニジ恒星時により定まる視線ベクトルで座標回転を行い、方位と地平高度を得ます。これから、各投影機の設置位置の視差補正を行い、投影機のXY目標角を算出します。
コンピュータは刻々と移り変わる天体の位置を計算し、投影機の目標角をはじき出します。この目標値に対し、投影機をつねに正しく向かわ続けるには、制御のテクニックが必要となります。アストロライナーでは、時間軸を1t(tはサンプリングタイム)だけ過去シフトさせた上で、将来目標時を推定(仮想目標値)することでリアルタイムの誤差を低減する独自のアルゴリズムを採用して、高速運転時でも誤差が大きくならないようにしています。
ソフトウエアマニュアルモードおよびオートモードでは、地球上の星空だけでなく、月や火星、あるいは太陽系内の任意の位置を視点とした星空を再現することができます。これらの機能を実現するために、以下のようなモードが用意されています。
1)惑星上モード
惑星上に視点をおくモードです。ふつうは視点惑星を地球とした惑星上モードを使います。緯度、経度を変えることで惑星上の任意の地点(世界中の星空)を再現することができます。
ベクトルモード
太陽系内の任意の位置を視点とし、視線ベクトルを直接指定するモードです。太陽重力に影響されない宇宙船の自由飛行を想定しています。太陽を原点とした半径0.1光年の範囲内の任意の場所からみた眺めを再現することができます。
トラックモード
ある天体をつねにトラッキングし、あらかじめ指定された位置(方位&方角)にホールドするモードです。視点位置はベクトルモード同様に任意に指定することができます。
グラビティモード
惑星同様、太陽重力の束縛を受けてケプラー運動する宇宙船をシミュレートするモードです。初速度、初期ベクトルを指定します。